

技术资料
FANUC发那科机器人码垛功能应用(四)——发那科机器人代理
示教堆上式样
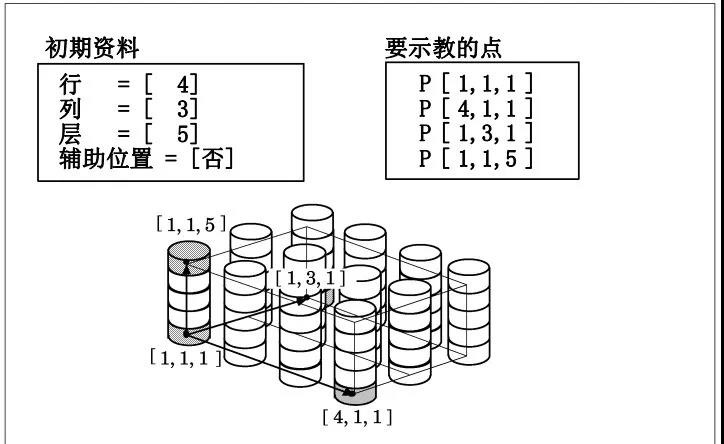
在码垛堆积的堆上式样示教画面上,对堆上式样的代表堆上点进行示教。由此,执行码垛堆积时,从所示教的代表点自动计算目标堆上点。
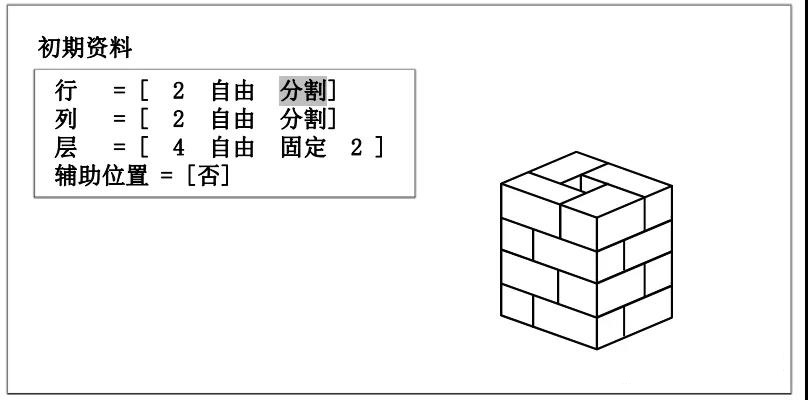
通过码垛堆积初始数据,显示应该示教的位置一览。据此,对代表堆上点的位置进行示教。
补助点的有/无
无补助点的堆上式样下,分别对堆上式样的四角形的4个顶点进行示教。
有补助点的堆上式样,以第 1 层的形状为梯形时所使用的功能,对四角形的第 5 个顶点进行示教。
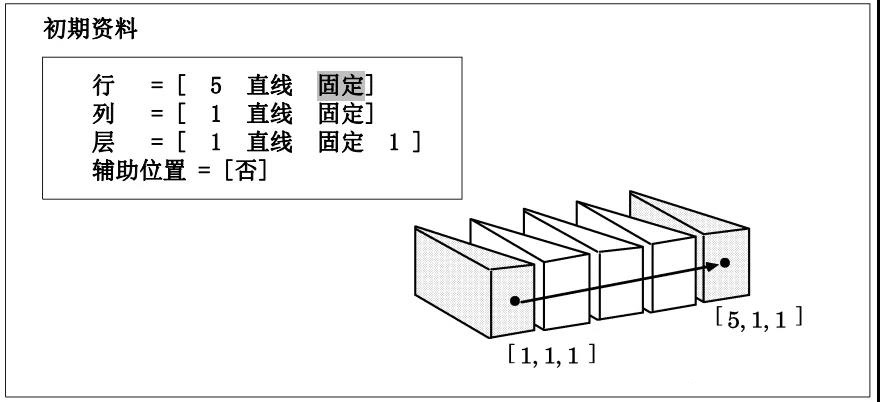
排列方法的种类/直线示教
选择了直线示教的情况下,通过示教端缘的 2 个代表点,设定行、列和层方向的所有点(标准)。

- 自由示教
选择了自由示教的情况下,直接对行、列和层方向的所有点进行示教。

- 间隔指定
选择了间隔指定的情况下,通过指定行、列和层方向的直线和其间的距离,设定所有点。

- 姿势控制的种类
固定姿势,在所有堆上点,始终取[1,1,1]中所示教的姿势(标准)。
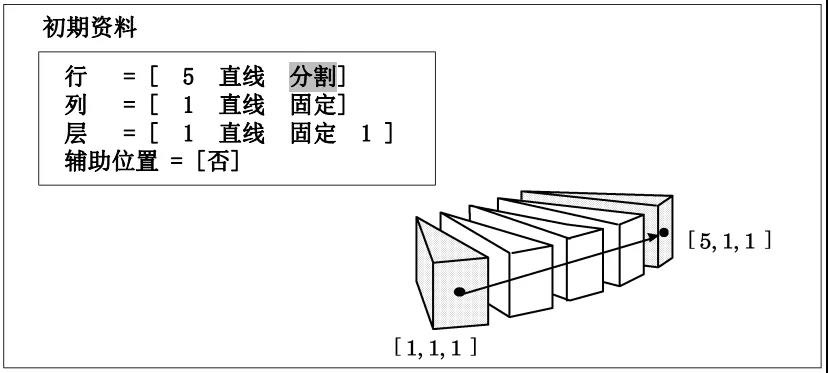
分割姿势,在进行直线示教时,分割后取端缘直线中所示教的姿势。自由示教时,取所示教点的姿势。
- 层式样数
在诸如以间隔数层确定的堆上方法进行堆上的情形下,输入该式样数。层式样数,只有在层排列为直线示教时才有效(其他情况下,层式样始终等于 1)。第1层必定会相对层式样1的堆上点进行堆上。假设层式样数为 N 个时,到第 N 层为止层数和层式样数相同,而第(N+1)层以后,层式样数又从层式样1反复进行。仅在层式样 1 的位置示教中进行层方向的位置示教。各层式样的层方向位置通过层式样 1 的示教计算得出。
层式样最多可设定 16 个。但全层数少于 16 层时,不能设定超出该层数的层式样数。此外,变更为层数比层式样数小时,层式样数将自动变更为该层数。
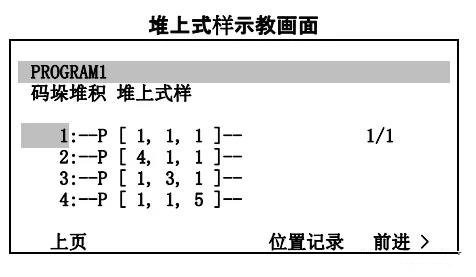
示教码垛堆积堆上式样
步骤
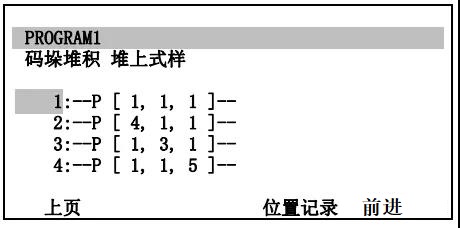
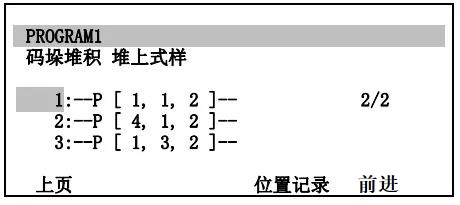
1 按照初期资料的设定,显示应该示教的堆上点一览。
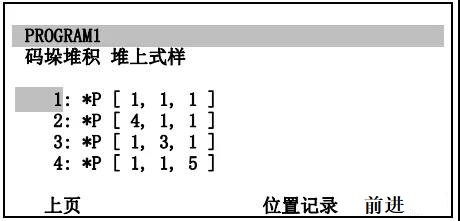
2 将发那科机器人点动进给到希望示教的代表堆上点。
3 将光标指向相应行,在按住 SHIFT 键的同时按下 F4“位置记录”。当前的机器人位置即被记录下来。
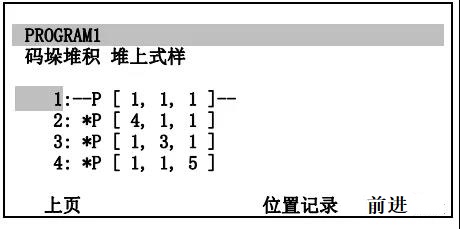
未示教位置显示有“*”,已示教位置显示有“ -- ”标记。
4 要显示所示教的代表堆上点的位置详细数据,将光标指向堆上点号码,按下 F5“位置”。显示出位置详细数据。
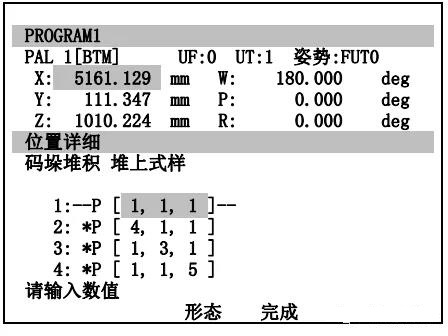
也可以直接输入位置数据的数值。返回时,按下 F4“完成”。
5 在按住 SHIFT 键的同时按下 FWD(前进)键时,机器人移动到光标行的代表堆上点。可以进行示教点的确认。
6 按照相同的步骤,对所有代表堆上点进行示教。
7 按下 F1“上页”,返回到之前的初期资料示教画面。
8 按下 F5“前进”,显示下一个线路点条件设定画面(BX、EX),或线路点示教画面(B、E)(见 10.3.4 小节和 10.3.5小节)。

了解更多发那科机器人
文章来源网络,如有侵权请联系删除
