

技术资料
FANUC发那科机器人码垛功能应用(二)——发那科机器人代理
示教码垛堆积
码垛堆积的示教,按照如下步骤进行。
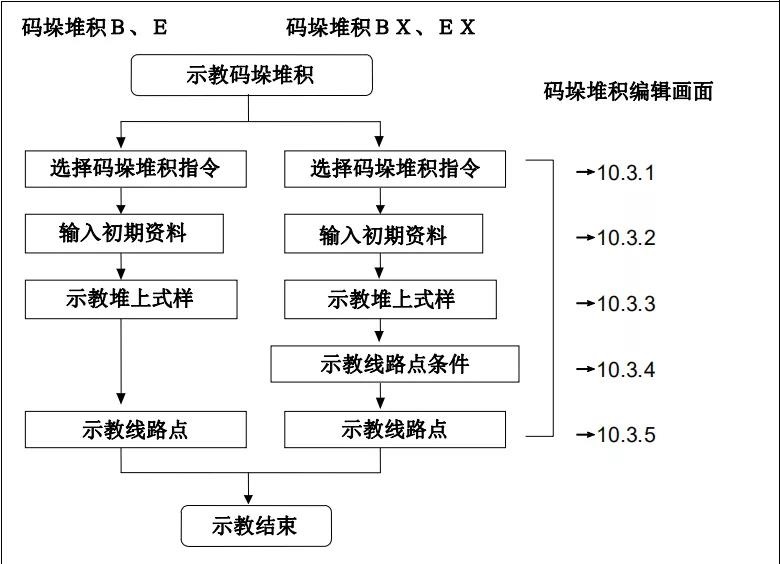
码垛堆积的示教,在码垛堆积编辑画面上进行。选择码垛堆积指令时,自动出现一个码垛堆积编辑画面。通过码垛堆积的示教,自动插入码垛堆积指令、码垛堆积动作指令、码垛堆积结束指令等所需的码垛堆积指令。
这里就码垛堆积EX进行描述。有关码垛堆积B、BX、E,假设码垛堆积EX的功能受到限制。
选择码垛堆积指令
码垛堆积指令的选择,选择希望进行示教的码垛堆积种类(码垛堆积B、BX、E、EX)。
条件
• 示教器处在有效状态。
• 已在程序编辑画面选择码垛堆积指令。
步骤
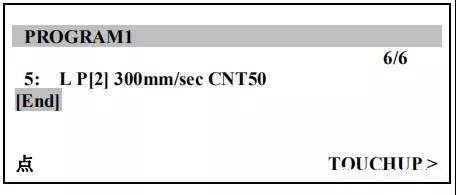
1 按下 NEXT(下一页)、“>” ,按下页上的 F1[指令],显示辅助菜单。

2 选择“7 码垛”。

3 选择“4 PALLETIZING-EX”(4 码垛堆积 EX)。自动进入码垛堆积示教画面。出现初期资料输入画面。
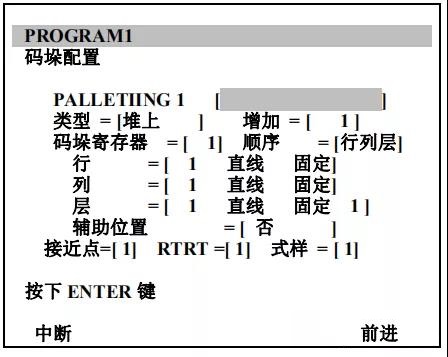
输入初期资料
在码垛堆积码垛堆积初期资料输入画面,设定进行什么样的码垛堆积。这里设定的数据,将在后面的示教画面上使用。初期资料输入画面,根据码垛堆积的种类有 4 类显示。其构成如下所示。
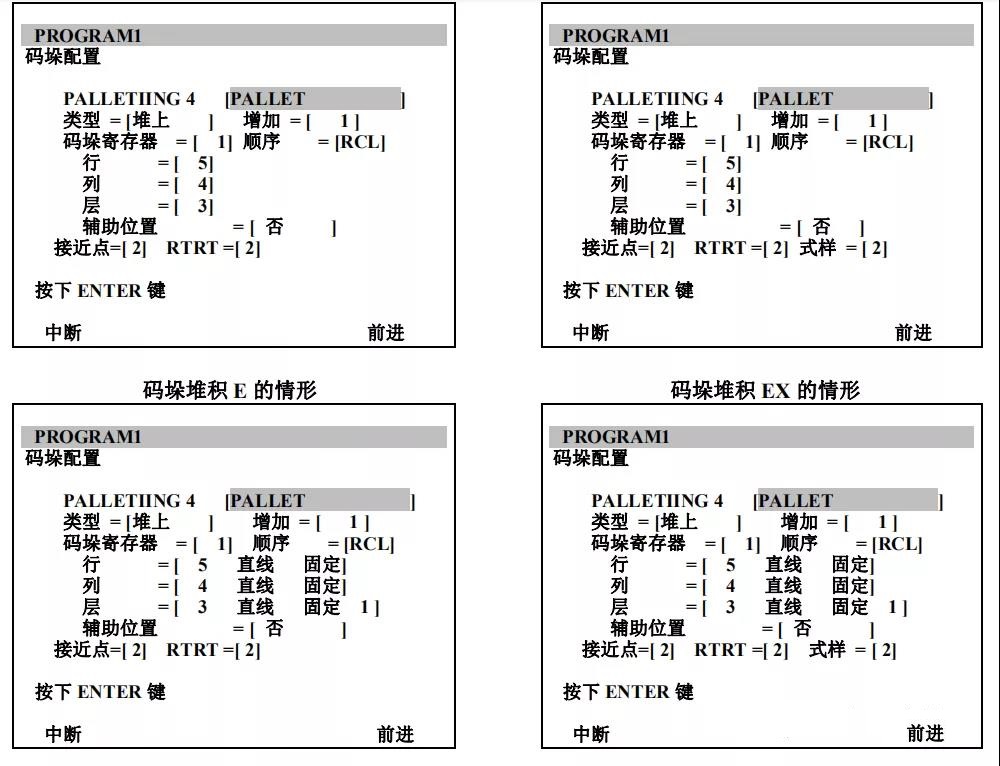

通过码垛堆积指令的选择,显示对应所选的码垛堆积种类的初期资料输入画面。若是码垛堆积 EX,可以指定码垛堆积的所有功能。码垛堆积 B、BX、E,其可以输入的功能则受到限制。
这里就码垛堆积EX进行描述。有关码垛堆积 B、BX、E,假设码垛堆积 EX 的功能受到限制。
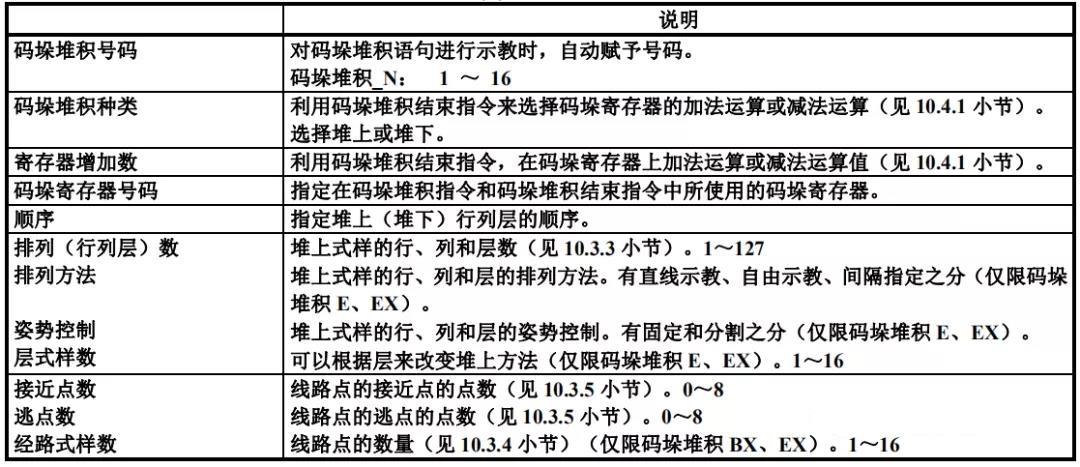
与堆上方法相关的初期资料
基于码垛堆积的堆上点控制,使用码垛寄存器进行。可利用初期资料来指定码垛寄存器的控制。由此,设定堆上方法。
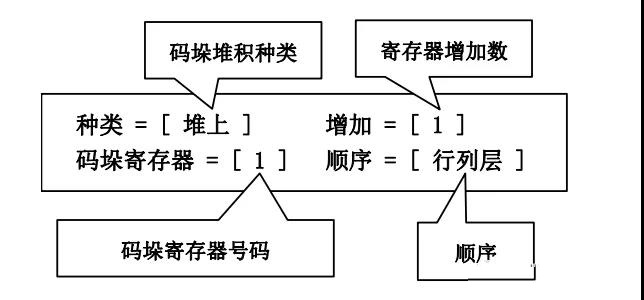
码垛堆积种类(种类),指定堆上/堆下(标准:堆上)。
• 增加,指定每隔几个堆上(堆下)。也即,通过码垛堆积结束指令,来指定加法运算或减法运算几个码垛寄存器。标准值为 1
• 码垛寄存器,指定上述进行与堆上方法有关的控制的码垛寄存器的寄存器号码。
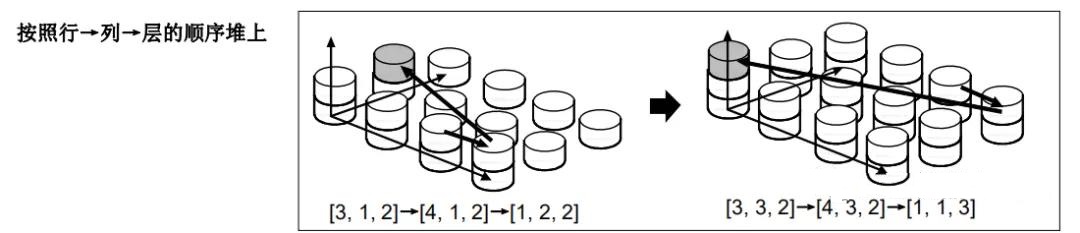
• 顺序,表示堆上/堆下顺序。
与堆上式样相关的初期资料
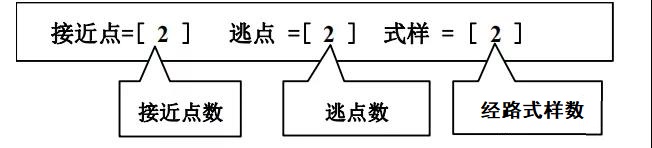
作为堆上式样的初期资料,设定排列(行、列、层)数、排列方法、姿势控制、层式样数、补助点的有/无。
了解更多发那科机器人
文章来源网络,如有侵权请联系删除
